daily_automated
This commit is contained in:
720
trunk/Arduino/libraries/IRremote/README.md
Normal file
720
trunk/Arduino/libraries/IRremote/README.md
Normal file
@@ -0,0 +1,720 @@
|
||||
<div align = center>
|
||||
|
||||
# Arduino IRremote
|
||||
A library enabling the sending & receiving of infra-red signals.
|
||||
|
||||
[](https://opensource.org/licenses/MIT)
|
||||
|
||||
[](https://github.com/Arduino-IRremote/Arduino-IRremote/releases/latest)
|
||||
|
||||
[](https://github.com/Arduino-IRremote/Arduino-IRremote/commits/master)
|
||||
|
||||
[](https://github.com/Arduino-IRremote/Arduino-IRremote/actions)
|
||||
<br/>
|
||||
<br/>
|
||||
[](https://stand-with-ukraine.pp.ua)
|
||||
|
||||
Available as [Arduino library "IRremote"](https://www.arduinolibraries.info/libraries/i-rremote).
|
||||
|
||||
[](https://www.ardu-badge.com/IRremote)
|
||||
|
||||
[](https://arduino-irremote.github.io/Arduino-IRremote/classIRrecv.html)
|
||||
|
||||
[](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/changelog.md)
|
||||
|
||||
[](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/Contributing.md)
|
||||
|
||||
</div>
|
||||
|
||||
# Overview
|
||||
- [Supported IR Protocols](https://github.com/Arduino-IRremote/Arduino-IRremote#supported-ir-protocols)
|
||||
- [Features](https://github.com/Arduino-IRremote/Arduino-IRremote#features)
|
||||
* [New features with version 3.x](https://github.com/Arduino-IRremote/Arduino-IRremote#new-features-with-version-3x)
|
||||
- [Converting your 2.x program to the 3.x version](https://github.com/Arduino-IRremote/Arduino-IRremote#converting-your-2x-program-to-the-3x-version)
|
||||
* [Staying on 2.x](https://github.com/Arduino-IRremote/Arduino-IRremote#staying-on-2x)
|
||||
* [How to convert old MSB first 32 bit IR data codes to new LSB first 32 bit IR data codes](https://github.com/Arduino-IRremote/Arduino-IRremote#how-to-convert-old-msb-first-32-bit-ir-data-codes-to-new-lsb-first-32-bit-ir-data-codes)
|
||||
- [Errors with using the 3.x versions for old tutorials](https://github.com/Arduino-IRremote/Arduino-IRremote#errors-with-using-the-3x-versions-for-old-tutorials)
|
||||
- [Why *.hpp instead of *.cpp](https://github.com/Arduino-IRremote/Arduino-IRremote#why-hpp-instead-of-cpp)
|
||||
- [Using the new *.hpp files](https://github.com/Arduino-IRremote/Arduino-IRremote#using-the-new-hpp-files)
|
||||
- [Receiving IR codes](https://github.com/Arduino-IRremote/Arduino-IRremote#receiving-ir-codes)
|
||||
* [Data format](https://github.com/Arduino-IRremote/Arduino-IRremote#data-format)
|
||||
- [Minimal NEC receiver](https://github.com/Arduino-IRremote/Arduino-IRremote#minimal-nec-receiver)
|
||||
- [Sending IR codes](https://github.com/Arduino-IRremote/Arduino-IRremote#sending-ir-codes)
|
||||
+ [List of public IR code databases](https://github.com/Arduino-IRremote/Arduino-IRremote#list-of-public-ir-code-databases)
|
||||
- [FAQ and hints](https://github.com/Arduino-IRremote/Arduino-IRremote#faq-and-hints)
|
||||
* [Problems with Neopixels, FastLed etc.](https://github.com/Arduino-IRremote/Arduino-IRremote#problems-with-neopixels-fastled-etc)
|
||||
* [Does not work/compile with another library](https://github.com/Arduino-IRremote/Arduino-IRremote#does-not-workcompile-with-another-library)
|
||||
* [Multiple IR receiver](https://github.com/Arduino-IRremote/Arduino-IRremote#multiple-ir-receiver)
|
||||
* [Increase strength of sent output signal](https://github.com/Arduino-IRremote/Arduino-IRremote#increase-strength-of-sent-output-signal)
|
||||
* [Minimal CPU frequency](https://github.com/Arduino-IRremote/Arduino-IRremote#minimal-cpu-frequency)
|
||||
- [Handling unknown Protocols](https://github.com/Arduino-IRremote/Arduino-IRremote#handling-unknown-protocols)
|
||||
* [Disclaimer](https://github.com/Arduino-IRremote/Arduino-IRremote#disclaimer)
|
||||
* [Protocol=PULSE_DISTANCE](https://github.com/Arduino-IRremote/Arduino-IRremote#protocolpulse_distance)
|
||||
* [Protocol=UNKNOWN](https://github.com/Arduino-IRremote/Arduino-IRremote#protocolunknown)
|
||||
* [How to deal with protocols not supported by IRremote](https://github.com/Arduino-IRremote/Arduino-IRremote#how-to-deal-with-protocols-not-supported-by-irremote)
|
||||
- [Examples for this library](https://github.com/Arduino-IRremote/Arduino-IRremote#examples-for-this-library)
|
||||
- [WOKWI online examples](https://github.com/Arduino-IRremote/Arduino-IRremote#wokwi-online-examples)
|
||||
- [Issues and discussions](https://github.com/Arduino-IRremote/Arduino-IRremote#issues-and-discussions)
|
||||
- [Compile options / macros for this library](https://github.com/Arduino-IRremote/Arduino-IRremote#compile-options--macros-for-this-library)
|
||||
+ [Changing include (*.h) files with Arduino IDE](https://github.com/Arduino-IRremote/Arduino-IRremote#changing-include-h-files-with-arduino-ide)
|
||||
+ [Modifying compile options with Sloeber IDE](https://github.com/Arduino-IRremote/Arduino-IRremote#modifying-compile-options--macros-with-sloeber-ide)
|
||||
- [Supported Boards](https://github.com/Arduino-IRremote/Arduino-IRremote#supported-boards)
|
||||
- [Timer and pin usage](https://github.com/Arduino-IRremote/Arduino-IRremote#timer-and-pin-usage)
|
||||
* [Incompatibilities to other libraries and Arduino commands like tone() and analogWrite()](https://github.com/Arduino-IRremote/Arduino-IRremote#incompatibilities-to-other-libraries-and-arduino-commands-like-tone-and-analogwrite)
|
||||
* [Hardware-PWM signal generation for sending](https://github.com/Arduino-IRremote/Arduino-IRremote#hardware-pwm-signal-generation-for-sending)
|
||||
* [Why do we use 30% duty cycle for sending](https://github.com/Arduino-IRremote/Arduino-IRremote#why-do-we-use-30-duty-cycle-for-sending)
|
||||
- [How we decode signals](https://github.com/Arduino-IRremote/Arduino-IRremote#how-we-decode-signals)
|
||||
- [NEC encoding diagrams](https://github.com/Arduino-IRremote/Arduino-IRremote#nec-encoding-diagrams)
|
||||
- [Quick comparison of 5 Arduino IR receiving libraries](https://github.com/Arduino-IRremote/Arduino-IRremote#quick-comparison-of-5-arduino-ir-receiving-libraries)
|
||||
- [Useful links](https://github.com/Arduino-IRremote/Arduino-IRremote#useful-links)
|
||||
- [Contributors](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/Contributors.md)
|
||||
- [License](https://github.com/Arduino-IRremote/Arduino-IRremote#license)
|
||||
- [Copyright](https://github.com/Arduino-IRremote/Arduino-IRremote#copyright)
|
||||
|
||||
<br/>
|
||||
|
||||
# Supported IR Protocols
|
||||
` NEC / Onkyo / Apple ` ` Denon / Sharp ` ` Panasonic / Kaseikyo `
|
||||
|
||||
` JVC ` ` LG ` ` RC5 ` ` RC6 ` ` Samsung ` ` Sony `
|
||||
|
||||
` Universal Distance ` ` Hash ` ` Pronto `
|
||||
|
||||
` BoseWave ` ` Lego ` ` Whynter ` ` MagiQuest `
|
||||
|
||||
Protocols can be switched off and on by defining macros before the line `#include <IRremote.hpp>` like [here](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/examples/SimpleReceiver/SimpleReceiver.ino#L33):
|
||||
|
||||
```c++
|
||||
#define DECODE_NEC
|
||||
//#define DECODE_DENON
|
||||
#include <IRremote.hpp>
|
||||
```
|
||||
<br/>
|
||||
|
||||
# Features
|
||||
- Lots of tutorials and examples.
|
||||
- Actively maintained.
|
||||
- Allows receiving and sending of **raw timing data**.
|
||||
|
||||
## New features with version 3.x
|
||||
- **Any pin** can be used for sending / receiving.
|
||||
- Feedback LED can be activated for sending / receiving.
|
||||
- An 8/16 bit ****command** value as well as an 16 bit **address** and a protocol number is provided for decoding (instead of the old 32 bit value).
|
||||
- Protocol values comply to **protocol standards**.<br/>
|
||||
NEC, Panasonic, Sony, Samsung and JVC decode & send LSB first.
|
||||
- Supports **Universal Distance protocol**, which covers a lot of previous unknown protocols.
|
||||
- Compatible with **tone()** library. See the [ReceiveDemo](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/21b5747a58e9d47c9e3f1beb056d58c875a92b47/examples/ReceiveDemo/ReceiveDemo.ino#L159-L169) example.
|
||||
- Simultaneous sending and receiving. See the [SendAndReceive](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/examples/SendAndReceive/SendAndReceive.ino#L167-L170) example.
|
||||
- Supports **more platforms**.
|
||||
- Allows for the generation of non PWM signal to just **simulate an active low receiver signal** for direct connect to existent receiving devices without using IR.
|
||||
- Easy protocol configuration, **directly in your [source code](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/examples/SimpleReceiver/SimpleReceiver.ino#L33-L57)**.<br/>
|
||||
Reduces memory footprint and decreases decoding time.
|
||||
- Contains a [very small NEC only decoder](https://github.com/Arduino-IRremote/Arduino-IRremote#minimal-nec-receiver), which **does not require any timer resource**.
|
||||
|
||||
[-> Feature comparison of 5 Arduino IR libraries](https://github.com/Arduino-IRremote/Arduino-IRremote#quick-comparison-of-5-arduino-ir-receiving-libraries).
|
||||
|
||||
<br/>
|
||||
|
||||
# Converting your 2.x program to the 3.x version
|
||||
Starting with the 3.1 version, **the generation of PWM for sending is done by software**, thus saving the hardware timer and **enabling arbitrary output pins for sending**.<br/>
|
||||
If you use an (old) Arduino core that does not use the `-flto` flag for compile, you can activate the line `#define SUPPRESS_ERROR_MESSAGE_FOR_BEGIN` in IRRemote.h, if you get false error messages regarding begin() during compilation.
|
||||
|
||||
- **IRreceiver** and **IRsender** object have been added and can be used without defining them, like the well known Arduino **Serial** object.
|
||||
- Just remove the line `IRrecv IrReceiver(IR_RECEIVE_PIN);` and/or `IRsend IrSender;` in your program, and replace all occurrences of `IRrecv.` or `irrecv.` with `IrReceiver` and replace all `IRsend` or `irsend` with `IrSender`.
|
||||
- Since the decoded values are now in `IrReceiver.decodedIRData` and not in `results` any more, remove the line `decode_results results` or similar.
|
||||
- Like for the Serial object, call [`IrReceiver.begin(IR_RECEIVE_PIN, ENABLE_LED_FEEDBACK)`](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/examples/ReceiveDemo/ReceiveDemo.ino#L106)
|
||||
or `IrReceiver.begin(IR_RECEIVE_PIN, DISABLE_LED_FEEDBACK)` instead of the `IrReceiver.enableIRIn()` or `irrecv.enableIRIn()` in setup().<br/>
|
||||
For sending, call `IrSender.begin(IR_SEND_PIN, ENABLE_LED_FEEDBACK);` or `IrSender.begin(IR_SEND_PIN, DISABLE_LED_FEEDBACK);` in setup().
|
||||
- Old `decode(decode_results *aResults)` function is replaced by simple `decode()`. So if you have a statement `if(irrecv.decode(&results))` replace it with `if (IrReceiver.decode())`.
|
||||
- The decoded result is now in in `IrReceiver.decodedIRData` and not in `results` any more, therefore replace any occurrences of `results.value` and `results.decode_type` (and similar) to
|
||||
`IrReceiver.decodedIRData.decodedRawData` and `IrReceiver.decodedIRData.protocol`.
|
||||
- Overflow, Repeat and other flags are now in [`IrReceiver.receivedIRData.flags`](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/src/IRremoteInt.h#L164-L187).
|
||||
- Seldom used: `results.rawbuf` and `results.rawlen` must be replaced by `IrReceiver.decodedIRData.rawDataPtr->rawbuf` and `IrReceiver.decodedIRData.rawDataPtr->rawlen`.
|
||||
|
||||
### Example
|
||||
#### 2.x program:
|
||||
|
||||
```c++
|
||||
#include <IRremote.h>
|
||||
|
||||
IRrecv irrecv(RECV_PIN);
|
||||
decode_results results;
|
||||
|
||||
void setup()
|
||||
{
|
||||
...
|
||||
irrecv.enableIRIn(); // Start the receiver
|
||||
}
|
||||
|
||||
void loop() {
|
||||
if (irrecv.decode(&results)) {
|
||||
Serial.println(results.value, HEX);
|
||||
...
|
||||
irrecv.resume(); // Receive the next value
|
||||
}
|
||||
...
|
||||
}
|
||||
```
|
||||
|
||||
#### 3.x program:
|
||||
|
||||
```c++
|
||||
#include <IRremote.hpp>
|
||||
|
||||
void setup()
|
||||
{
|
||||
...
|
||||
IrReceiver.begin(IR_RECEIVE_PIN, ENABLE_LED_FEEDBACK); // Start the receiver
|
||||
}
|
||||
|
||||
void loop() {
|
||||
if (IrReceiver.decode()) {
|
||||
Serial.println(IrReceiver.decodedIRData.decodedRawData, HEX);
|
||||
IrReceiver.printIRResultShort(&Serial); // optional use new print version
|
||||
...
|
||||
IrReceiver.resume(); // Enable receiving of the next value
|
||||
}
|
||||
...
|
||||
}
|
||||
```
|
||||
## Staying on 2.x
|
||||
Consider using the [original 2.4 release form 2017](https://github.com/Arduino-IRremote/Arduino-IRremote/releases/tag/v2.4.0)
|
||||
or the last backwards compatible [2.8 version](https://github.com/Arduino-IRremote/Arduino-IRremote/releases/tag/2.8.0) for you project.<br/>
|
||||
It may be sufficient and deals flawlessly with 32 bit IR codes.<br/>
|
||||
If this doesn't fit your case, be assured that 3.x is at least trying to be backwards compatible, so your old examples should still work fine.
|
||||
|
||||
### Drawbacks
|
||||
- Only the following decoders are available:<br/>
|
||||
` NEC ` ` Denon ` ` Panasonic ` ` JVC ` ` LG `<br/>
|
||||
` RC5 ` ` RC6 ` ` Samsung ` ` Sony `
|
||||
- The call of `irrecv.decode(&results)` uses the old MSB first decoders like in 2.x and sets the 32 bit codes in `results.value`.
|
||||
- The old functions `sendNEC()` and `sendJVC()` are renamed to `sendNECMSB()` and `sendJVCMSB()`.<br/>
|
||||
Use them to send your **old MSB-first 32 bit IR data codes**.
|
||||
- No decoding by a (constant) 8/16 bit address and an 8 bit command.
|
||||
|
||||
## How to convert old MSB first 32 bit IR data codes to new LSB first 32 bit IR data codes
|
||||
For the new decoders for **NEC, Panasonic, Sony, Samsung and JVC**, the result `IrReceiver.decodedIRData.decodedRawData` is now **LSB-first**, as the definition of these protocols suggests!<br/>
|
||||
<br/>
|
||||
To convert one into the other, you must reverse the byte/nibble positions and then reverse all bit positions of each byte/nibble or write it as one binary string and reverse/mirror it.<br/><br/>
|
||||
Example:
|
||||
`0xCB 34 01 02`<br/>
|
||||
`0x20 10 43 BC` after nibble reverse<br/>
|
||||
`0x40 80 2C D3` after bit reverse of each nibble<br/><br/>
|
||||
### Nibble reverse map:
|
||||
```
|
||||
0->0 1->8 2->4 3->C
|
||||
4->2 5->A 6->6 7->E
|
||||
8->1 9->9 A->5 B->D
|
||||
C->3 D->B E->7 F->F
|
||||
```
|
||||
`0xCB340102` is binary `1100 1011 0011 0100 0000 0001 0000 0010`.<br/>
|
||||
`0x40802CD3` is binary `0100 0000 1000 0000 0010 1100 1101 0011`.<br/>
|
||||
If you **read the first binary sequence backwards** (right to left), you get the second sequence.
|
||||
|
||||
<br/>
|
||||
|
||||
# Errors with using the 3.x versions for old tutorials
|
||||
If you suffer from errors with old tutorial code including `IRremote.h` instead of `IRremote.hpp`, just try to rollback to [Version 2.4.0](https://github.com/Arduino-IRremote/Arduino-IRremote/releases/tag/v2.4.0).<br/>
|
||||
Most likely your code will run and you will not miss the new features...
|
||||
|
||||
<br/>
|
||||
|
||||
# Why *.hpp instead of *.cpp?
|
||||
**Every \*.cpp file is compiled separately** by a call of the compiler exclusively for this cpp file. These calls are managed by the IDE / make system.
|
||||
In the Arduino IDE the calls are executed when you click on *Verify* or *Upload*.
|
||||
|
||||
And now our problem with Arduino is:<br/>
|
||||
**How to set [compile options](#compile-options--macros-for-this-library) for all *.cpp files, especially for libraries used?**<br/>
|
||||
IDE's like [Sloeber](https://github.com/ArminJo/ServoEasing#modifying-compile-options--macros-with-sloeber-ide) or [PlatformIO](https://github.com/ArminJo/ServoEasing#modifying-compile-options--macros-with-platformio) support this by allowing to specify a set of options per project.
|
||||
They add these options at each compiler call e.g. `-DTRACE`.
|
||||
|
||||
But Arduino lacks this feature.
|
||||
So the **workaround** is not to compile all sources separately, but to concatenate them to one huge source file by including them in your source.<br/>
|
||||
This is done by e.g. `#include "IRremote.hpp"`.
|
||||
|
||||
But why not `#include "IRremote.cpp"`?<br/>
|
||||
Try it and you will see tons of errors, because each function of the *.cpp file is now compiled twice,
|
||||
first by compiling the huge file and second by compiling the *.cpp file separately, like described above.<br/>
|
||||
So using the extension *cpp* is not longer possible, and one solution is to use *hpp* as extension, to show that it is an included *.cpp file.<br/>
|
||||
Every other extension e.g. *cinclude* would do, but *hpp* seems to be common sense.
|
||||
|
||||
# Using the new *.hpp files
|
||||
In order to support [compile options](#compile-options--macros-for-this-library) more easily,
|
||||
you must use the statement `#include <IRremote.hpp>` instead of `#include <IRremote.h>` in your main program (aka *.ino file with setup() and loop()).
|
||||
|
||||
In **all other files** you must use the following, to **prevent `multiple definitions` linker errors**:
|
||||
|
||||
```c++
|
||||
#define USE_IRREMOTE_HPP_AS_PLAIN_INCLUDE
|
||||
#include <IRremote.hpp>
|
||||
```
|
||||
|
||||
**Ensure that all macros in your main program are defined before any** `#include <IRremote.hpp>`. <br/>
|
||||
The following macros will definitely be overridden with default values otherwise:
|
||||
- `RAW_BUFFER_LENGTH`
|
||||
- `IR_SEND_PIN`
|
||||
- `SEND_PWM_BY_TIMER`
|
||||
|
||||
<br/>
|
||||
|
||||
# Receiving IR codes
|
||||
Check for **received data** with:<br/>
|
||||
`if (IrReceiver.decode()) {}`<br/>
|
||||
This also decodes the received data.
|
||||
|
||||
## Data format
|
||||
After successful decoding, the IR data is contained in the IRData structure, available as `IrReceiver.decodedIRData`.
|
||||
|
||||
```c++
|
||||
struct IRData {
|
||||
decode_type_t protocol; // UNKNOWN, NEC, SONY, RC5, PULSE_DISTANCE, ...
|
||||
uint16_t address; // Decoded address
|
||||
uint16_t command; // Decoded command
|
||||
uint16_t extra; // Used for Kaseikyo unknown vendor ID. Ticks used for decoding Distance protocol.
|
||||
uint16_t numberOfBits; // Number of bits received for data (address + command + parity) - to determine protocol length if different length are possible.
|
||||
uint8_t flags; // See IRDATA_FLAGS_* definitions
|
||||
uint32_t decodedRawData; // Up to 32 bit decoded raw data, used for sendRaw functions.
|
||||
uint32_t decodedRawDataArray[RAW_DATA_ARRAY_SIZE]; // 32 bit decoded raw data, to be used for send function.
|
||||
irparams_struct *rawDataPtr; // Pointer of the raw timing data to be decoded. Mainly the data buffer filled by receiving ISR.
|
||||
};
|
||||
```
|
||||
|
||||
#### To access the **RAW data**, use:
|
||||
```c++
|
||||
uint32_t myRawdata= IrReceiver.decodedIRData.decodedRawData;
|
||||
```
|
||||
|
||||
The definitions for the `IrReceiver.decodedIRData.flags` are described [here](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/src/IRremoteInt.h#L128-L140).
|
||||
|
||||
#### Print all fields:
|
||||
```c++
|
||||
IrReceiver.printIRResultShort(&Serial);
|
||||
```
|
||||
|
||||
#### Print the raw timing data received:
|
||||
```c++
|
||||
IrReceiver.printIRResultRawFormatted(&Serial, true);`
|
||||
```
|
||||
|
||||
<br/>
|
||||
|
||||
# Minimal NEC receiver
|
||||
For applications only requiring NEC protocol, there is a special receiver included,<br/>
|
||||
which has very **small code size of 500 bytes and does NOT require any timer**.
|
||||
|
||||
Check out the [MinimalReceiver](https://github.com/Arduino-IRremote/Arduino-IRremote#minimalreceiver) and [IRDispatcherDemo](https://github.com/Arduino-IRremote/Arduino-IRremote#irdispatcherdemo) examples.
|
||||
|
||||
<br/>
|
||||
|
||||
# Sending IR codes
|
||||
Please do not use the old send*Raw() functions for sending like e.g. `IrSender.sendNECRaw(0xE61957A8,2)`,
|
||||
even if this functions are used in a lot of **(old)** tutorials. They are only kept for backward compatibility and unsupported as well as error prone.<br/>
|
||||
**It is recommended** to use the **new structured functions** with address and command parameters like e.g. `IrSender.sendNEC(0xA8, 0x19, 2)`.
|
||||
Especially if you are able to receive these remote codes and get the address and command values.
|
||||
You will discover that **the address is a constant** and the commands sometimes are sensibly grouped.
|
||||
|
||||
### List of public IR code databases
|
||||
http://www.harctoolbox.org/IR-resources.html
|
||||
|
||||
<br/>
|
||||
|
||||
# FAQ and hints
|
||||
|
||||
## Problems with Neopixels, FastLed etc.
|
||||
IRremote will not work right when you use **Neopixels** (aka WS2811/WS2812/WS2812B) or other libraries blocking interrupts for a longer time (> 50 µs).<br/>
|
||||
Whether you use the Adafruit Neopixel lib, or FastLED, interrupts get disabled on many lower end CPUs like the basic Arduinos for longer than 50 µs.
|
||||
In turn, this stops the IR interrupt handler from running when it needs to.
|
||||
|
||||
One **workaround** is to wait for the IR receiver to be idle before you send the Neopixel data with `if (IrReceiver.isIdle()) { strip.show();}`.<br/>
|
||||
This **prevents at least breaking a running IR transmission** and -depending of the update rate of the Neopixel- may work quite well.<br/>
|
||||
There are some other solutions to this on more powerful processors,
|
||||
[see this page from Marc MERLIN](http://marc.merlins.org/perso/arduino/post_2017-04-03_Arduino-328P-Uno-Teensy3_1-ESP8266-ESP32-IR-and-Neopixels.html)
|
||||
|
||||
## Does not work/compile with another library
|
||||
**Another library is only working/compiling** if you deactivate the line `IrReceiver.begin(IR_RECEIVE_PIN, ENABLE_LED_FEEDBACK);`.<br/>
|
||||
This is often due to **timer resource conflicts** with the other library. Please see [below](https://github.com/Arduino-IRremote/Arduino-IRremote#timer-and-pin-usage).
|
||||
|
||||
## Multiple IR receivers
|
||||
You can use **multiple IR receiver** by just connecting the output pins of several IR receivers together.
|
||||
The IR receivers use an NPN transistor as output device with just a 30k resistor to VCC.
|
||||
This is almost "open collector" and allows connecting of several output pins to one Arduino input pin.
|
||||
|
||||
## Increase strength of sent output signal
|
||||
**The best way to increase the IR power for free** is to use 2 or 3 IR diodes in series. One diode requires 1.2 volt at 20 mA or 1.5 volt at 100 mA so you can supply up to 3 diodes with a 5 volt output.<br/>
|
||||
To power **2 diodes** with 1.2 volt and 20 mA and a 5 volt supply, set the resistor to: (5 V - 2.4 V) -> 2.6 V / 20 mA = **130 Ω**.<br/>
|
||||
For **3 diodes** it requires 1.4 V / 20 mA = **70 Ω**.<br/>
|
||||
The actual current might be lower since of **loss at the AVR pin**. E.g. 0.3 V at 20 mA.<br/>
|
||||
If you do not require more current than 20 mA, there is no need to use an external transistor (at least for AVR chips).
|
||||
|
||||
On my Arduino Nanos, I always use a 100 Ω series resistor and one IR LED :grinning:.
|
||||
|
||||
## Minimal CPU frequency
|
||||
For receiving, the **minimal CPU frequency is 4 MHz**, since the 50 µs timer ISR takes around 12 µs on a 16 MHz ATmega.<br/>
|
||||
For sending, the **default software generated PWM has problems on AVR running with 8 MHz**. The PWM frequency is around 30 instead of 38 kHz and RC6 is not reliable. You can switch to timer PWM generation by `#define SEND_PWM_BY_TIMER`.
|
||||
|
||||
# Handling unknown Protocols
|
||||
## Disclaimer
|
||||
**This library was designed to fit inside MCUs with relatively low levels of resources and was intended to work as a library together with other applications which also require some resources of the MCU to operate.**
|
||||
|
||||
For **air conditioners** [see this fork](https://github.com/crankyoldgit/IRremoteESP8266), which supports an impressive set of protocols and a lot of air conditioners.
|
||||
|
||||
For **long signals** see the blog entry: ["Recording long Infrared Remote control signals with Arduino"](https://www.analysir.com/blog/2014/03/19/air-conditioners-problems-recording-long-infrared-remote-control-signals-arduino).
|
||||
|
||||
|
||||
## Protocol=PULSE_DISTANCE
|
||||
If you get something like this:
|
||||
```
|
||||
PULSE_DISTANCE: HeaderMarkMicros=8900 HeaderSpaceMicros=4450 MarkMicros=550 OneSpaceMicros=1700 ZeroSpaceMicros=600 NumberOfBits=56 0x43D8613C 0x3BC3BC
|
||||
```
|
||||
then you have a code consisting of **56 bits**, which is probably from an air conditioner remote.<br/>
|
||||
You can send it with sendPulseDistance().
|
||||
```c++
|
||||
uint32_t tRawData[] = { 0xB02002, 0xA010 };
|
||||
IrSender.sendPulseDistance(38, 3450, 1700, 450, 1250, 450, 400, &tRawData[0], 48, false, 0, 0);
|
||||
```
|
||||
You can send it with calling sendPulseDistanceWidthData() twice, once for the first 32 bit and next for the remaining 24 bits.<br/>
|
||||
**The PulseDistance or PulseWidth decoders just decode a timing steam to a bit stream**.
|
||||
They can not put any semantics like address, command or checksum on this bitstream, since it is no known protocol.
|
||||
But the bitstream is way more readable, than a timing stream. This bitstream is read **LSB first by default**.
|
||||
If this does not suit you for further research, you can change it [here](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/src/ir_DistanceProtocol.hpp#L48).
|
||||
|
||||
## Protocol=UNKNOWN
|
||||
If you see something like `Protocol=UNKNOWN Hash=0x13BD886C 35 bits received` as output of e.g. the ReceiveDemo example, you either have a problem with decoding a protocol, or an unsupported protocol.
|
||||
|
||||
- If you have an **odd number of bits** received, it is likely, that your receiver circuit has problems. Maybe because the IR signal is too weak.
|
||||
- If you see timings like `+ 600,- 600 + 550,- 150 + 200,- 100 + 750,- 550` then one 450 µs space was split into two 150 and 100 µs spaces with a spike / error signal of 200 µs between. Maybe because of a defective receiver or a weak signal in conjunction with another light emitting source nearby.
|
||||
- If you see timings like `+ 500,- 550 + 450,- 550 + 500,- 500 + 500,-1550`, then marks are generally shorter than spaces and therefore `MARK_EXCESS_MICROS` (specified in your ino file) should be **negative** to compensate for this at decoding.
|
||||
- If you see `Protocol=UNKNOWN Hash=0x0 1 bits received` it may be that the space after the initial mark is longer than [`RECORD_GAP_MICROS`](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/src/IRremote.h#L124).
|
||||
This was observed for some LG air conditioner protocols. Try again with a line e.g. `#define RECORD_GAP_MICROS 12000` before the line `#include <IRremote.hpp>` in your ino file.
|
||||
- To see more info supporting you to find the reason for your UNKNOWN protocol, you must enable the line `//#define DEBUG` in IRremoteInt.h.
|
||||
|
||||
## How to deal with protocols not supported by IRremote
|
||||
If you do not know which protocol your IR transmitter uses, you have several choices.
|
||||
- Use the [IRreceiveDump example](examples/ReceiveDump) to dump out the IR timing.
|
||||
You can then reproduce/send this timing with the [SendRawDemo example](examples/SendRawDemo).
|
||||
For **long codes** with more than 48 bits like from air conditioners, you can **change the length of the input buffer** in [IRremote.h](src/IRremoteInt.h#L36).
|
||||
- The [IRMP AllProtocol example](https://github.com/IRMP-org/IRMP#allprotocol-example) prints the protocol and data for one of the **40 supported protocols**.
|
||||
The same library can be used to send this codes.
|
||||
- If you have a bigger Arduino board at hand (> 100 kByte program memory) you can try the
|
||||
[IRremoteDecode example](https://github.com/bengtmartensson/Arduino-DecodeIR/blob/master/examples/IRremoteDecode/IRremoteDecode.ino) of the Arduino library [DecodeIR](https://github.com/bengtmartensson/Arduino-DecodeIR).
|
||||
- Use [IrScrutinizer](http://www.harctoolbox.org/IrScrutinizer.html).
|
||||
It can automatically generate a send sketch for your protocol by exporting as "Arduino Raw". It supports IRremote,
|
||||
the old [IRLib](https://github.com/cyborg5/IRLib) and [Infrared4Arduino](https://github.com/bengtmartensson/Infrared4Arduino).
|
||||
|
||||
<br/>
|
||||
|
||||
# Examples for this library
|
||||
In order to fit the examples to the 8K flash of ATtiny85 and ATtiny88, the [Arduino library ATtinySerialOut](https://github.com/ArminJo/ATtinySerialOut) is required for this CPU's.
|
||||
|
||||
#### SimpleReceiver + SimpleSender
|
||||
This examples are a good starting point.
|
||||
A simple example can be tested online with [WOKWI](https://wokwi.com/projects/338611596994544210).
|
||||
|
||||
#### ReceiveDemo
|
||||
Receives all protocols and **generates a beep with the Arduino tone() function** on each packet received. By connecting pin 5 to ground, you can see the raw values for each packet. **Example how to use IRremote and tone() together**.
|
||||
|
||||
#### AllProtocols
|
||||
Like ReceiveDemo but with 1604 LCD output and without tone().
|
||||
|
||||
#### ReceiveDump
|
||||
Receives all protocols and dumps the received signal in different flavors. Since the printing takes so much time, repeat signals may be skipped or interpreted as UNKNOWN.
|
||||
|
||||
#### SendDemo
|
||||
Sends all available protocols at least once.
|
||||
|
||||
#### SendAndReceive + UnitTest
|
||||
ReceiveDemo + SendDemo in one program. **Receiving while sending**.
|
||||
|
||||
#### ReceiveAndSend
|
||||
Record and **play back last received IR signal** at button press.
|
||||
|
||||
### ReceiveOneAndSendMultiple
|
||||
Serves as a IR **remote macro expander**. Receives Samsung32 protocol and on receiving a specified input frame, it sends multiple Samsung32 frames with appropriate delays in between.
|
||||
This serves as a **Netflix-key emulation** for my old Samsung H5273 TV.
|
||||
|
||||
#### SmallReceiver
|
||||
If **code size** matters, look at these example.<br/>
|
||||
|
||||
#### MinimalReceiver
|
||||
The MinimalReceiver example uses the **TinyReceiver** library which can **only receive NEC codes, but does not require any timer**.<br/>
|
||||
MinimalReceiver can be tested online with [WOKWI](https://wokwi.com/arduino/projects/339264565653013075).
|
||||
Click on the receiver while simulation is running to specify individual IR codes.
|
||||
|
||||
#### IRDispatcherDemo
|
||||
Framework for **calling different functions of your program** for different IR codes.
|
||||
|
||||
#### IRrelay
|
||||
**Control a relay** (connected to an output pin) with your remote.
|
||||
|
||||
#### IRremoteExtensionTest
|
||||
Example for a user defined class, which itself uses the IRrecv class from IRremote.
|
||||
|
||||
#### SendLGAirConditionerDemo
|
||||
Example for sending LG air conditioner IR codes controlled by Serial input.<br/>
|
||||
By just using the function `bool Aircondition_LG::sendCommandAndParameter(char aCommand, int aParameter)` you can control the air conditioner by any other command source.<br/>
|
||||
The file *acLG.h* contains the command documentation of the LG air conditioner IR protocol. Based on reverse engineering of the LG AKB73315611 remote.
|
||||
<br/>
|
||||
IReceiverTimingAnalysis can be tested online with [WOKWI](https://wokwi.com/projects/299033930562011656)
|
||||
Click on the receiver while simulation is running to specify individual IR codes.
|
||||
|
||||
#### ReceiverTimingAnalysis
|
||||
This example analyzes the signal delivered by your IR receiver module.
|
||||
Values can be used to determine the stability of the received signal as well as a hint for determining the protocol.<br/>
|
||||
It also computes the `MARK_EXCESS_MICROS` value, which is the extension of the mark (pulse) duration introduced by the IR receiver module.<br/>
|
||||
It can be tested online with [WOKWI](https://wokwi.com/arduino/projects/299033930562011656).
|
||||
Click on the receiver while simulation is running to specify individual NEC IR codes.
|
||||
|
||||
# WOKWI online examples
|
||||
- [Simple receiver](https://wokwi.com/projects/338611596994544210).
|
||||
- [MinimalReceiver](https://wokwi.com/arduino/projects/339264565653013075)
|
||||
- [ReceiverTimingAnalysis](https://wokwi.com/projects/299033930562011656)
|
||||
- [Receiver with LCD output and switch statement](https://wokwi.com/projects/298934082074575369)
|
||||
|
||||
<br/>
|
||||
|
||||
# Issues and discussions
|
||||
- Do not open an issue without first testing some of the examples!
|
||||
- If you have a problem, please post the MCVE (Minimal Complete Verifiable Example) showing this problem. My experience is, that most of the times you will find the problem while creating this MCVE :smile:.
|
||||
- [Use code blocks](https://github.com/adam-p/markdown-here/wiki/Markdown-Cheatsheet#code); **it helps us help you when we can read your code!**
|
||||
|
||||
<br/>
|
||||
|
||||
# Compile options / macros for this library
|
||||
To customize the library to different requirements, there are some compile options / macros available.<br/>
|
||||
These macros must be defined in your program **before** the line `#include <IRremote.hpp>` to take effect.<br/>
|
||||
Modify them by enabling / disabling them, or change the values if applicable.
|
||||
|
||||
| Name | Default value | Description |
|
||||
|:---|---:|----|
|
||||
| `RAW_BUFFER_LENGTH` | 100 | Buffer size of raw input buffer. Must be even! 100 is sufficient for *regular* protocols of up to 48 bits, but for most air conditioner protocols a value of up to 750 is required. Use the ReceiveDump example to find smallest value for your requirements. |
|
||||
| `EXCLUDE_UNIVERSAL_PROTOCOLS` | disabled | Excludes the universal decoder for pulse distance protocols and decodeHash (special decoder for all protocols) from `decode()`. Saves up to 1000 bytes program memory. |
|
||||
| `DECODE_<Protocol name>` | all | Selection of individual protocol(s) to be decoded. You can specify multiple protocols. See [here](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/src/IRremote.hpp#L98-L121) |
|
||||
| `MARK_EXCESS_MICROS` | 20 | MARK_EXCESS_MICROS is subtracted from all marks and added to all spaces before decoding, to compensate for the signal forming of different IR receiver modules. |
|
||||
| `RECORD_GAP_MICROS` | 5000 | Minimum gap between IR transmissions, to detect the end of a protocol.<br/>Must be greater than any space of a protocol e.g. the NEC header space of 4500 µs.<br/>Must be smaller than any gap between a command and a repeat; e.g. the retransmission gap for Sony is around 24 ms.<br/>Keep in mind, that this is the delay between the end of the received command and the start of decoding. |
|
||||
| `IR_INPUT_IS_ACTIVE_HIGH` | disabled | Enable it if you use a RF receiver, which has an active HIGH output signal. |
|
||||
| `IR_SEND_PIN` | disabled | If specified (as constant), reduces program size and improves send timing for AVR. If you want to use a runtime variable send pin e.g. with `setSendPin(uint8_t aSendPinNumber)` , you must disable this macro. |
|
||||
| `SEND_PWM_BY_TIMER` | disabled | Disables carrier PWM generation in software and use (restricted) hardware PWM. Enabled for ESP32 and RP2040 in all examples. |
|
||||
| `USE_NO_SEND_PWM` | disabled | Uses no carrier PWM, just simulate an **active low** receiver signal. Overrides `SEND_PWM_BY_TIMER` definition. |
|
||||
| `IR_SEND_DUTY_CYCLE_PERCENT` | 30 | Duty cycle of IR send signal. |
|
||||
| `USE_OPEN_DRAIN_OUTPUT_FOR_SEND_PIN` | disabled | Uses or simulates open drain output mode at send pin. **Attention, active state of open drain is LOW**, so connect the send LED between positive supply and send pin! |
|
||||
| `EXCLUDE_EXOTIC_PROTOCOLS` | disabled | Excludes BOSEWAVE, WHYNTER and LEGO_PF from `decode()` and from sending with `IrSender.write()`. Saves up to 650 bytes program memory. |
|
||||
| `FEEDBACK_LED_IS_ACTIVE_LOW` | disabled | Required on some boards (like my BluePill and my ESP8266 board), where the feedback LED is active low. |
|
||||
| `NO_LED_FEEDBACK_CODE` | disabled | Disables the LED feedback code for send and receive. Saves around 100 bytes program memory for receiving, around 500 bytes for sending and halving the receiver ISR processing time. |
|
||||
| `MICROS_PER_TICK` | 50 | Resolution of the raw input buffer data. Corresponds to 2 pulses of each 26.3 µs at 38 kHz. |
|
||||
| `TOLERANCE_FOR_DECODERS_MARK_OR_SPACE_MATCHING` | 25 | Relative tolerance (in percent) for matchTicks(), matchMark() and matchSpace() functions used for protocol decoding. |
|
||||
| `DEBUG` | disabled | Enables lots of lovely debug output. |
|
||||
| `IR_USE_AVR_TIMER*` | | Selection of timer to be used for generating IR receiving sample interval. |
|
||||
|
||||
These next macros for **TinyIRReceiver** must be defined in your program before the line `#include <TinyIRReceiver.hpp>` to take effect.
|
||||
| Name | Default value | Description |
|
||||
|:---|---:|----|
|
||||
| `IR_INPUT_PIN` | 2 | The pin number for TinyIRReceiver IR input, which gets compiled in. |
|
||||
| `IR_FEEDBACK_LED_PIN` | `LED_BUILTIN` | The pin number for TinyIRReceiver feedback LED, which gets compiled in. |
|
||||
| `NO_LED_FEEDBACK_CODE` | disabled | Disables the feedback LED function. Saves 14 bytes program memory. |
|
||||
| `DISABLE_NEC_SPECIAL_REPEAT_SUPPORT` | disabled | Disables the detection of full NEC frame repeats. Saves 40 bytes program memory. |
|
||||
|
||||
### Changing include (*.h) files with Arduino IDE
|
||||
First, use *Sketch > Show Sketch Folder (Ctrl+K)*.<br/>
|
||||
If you have not yet saved the example as your own sketch, then you are instantly in the right library folder.<br/>
|
||||
Otherwise you have to navigate to the parallel `libraries` folder and select the library you want to access.<br/>
|
||||
In both cases the library source and include files are located in the libraries `src` directory.<br/>
|
||||
The modification must be renewed for each new library version!
|
||||
|
||||
### Modifying compile options / macros with PlatformIO
|
||||
If you are using PlatformIO, you can define the macros in the *[platformio.ini](https://docs.platformio.org/en/latest/projectconf/section_env_build.html)* file with `build_flags = -D MACRO_NAME` or `build_flags = -D MACRO_NAME=macroValue`.
|
||||
|
||||
### Modifying compile options / macros with Sloeber IDE
|
||||
If you are using [Sloeber](https://eclipse.baeyens.it) as your IDE, you can easily define global symbols with *Properties > Arduino > CompileOptions*.<br/>
|
||||

|
||||
|
||||
<br/>
|
||||
|
||||
# Supported Boards
|
||||
**Issues and discussions with the content "Is it possible to use this library with the ATTinyXYZ? / board XYZ" without any reasonable explanations will be immediately closed without further notice.**<br/>
|
||||
<br/>
|
||||
ATtiny and Digispark boards are only tested with the recommended [ATTinyCore](https://github.com/SpenceKonde/ATTinyCore) using `New Style` pin mapping for the pro board.
|
||||
- Arduino Uno / Mega / Leonardo / Duemilanove / Diecimila / LilyPad / Mini / Fio / Nano etc.
|
||||
- Teensy 1.0 / 1.0++ / 2.0 / 2++ / 3.0 / 3.1 / Teensy-LC - but [limited support](https://forum.pjrc.com/threads/65912-Enable-Continuous-Integration-with-arduino-cli-for-3-party-libraries); Credits: PaulStoffregen (Teensy Team)
|
||||
- Sanguino
|
||||
- ATmega8, 48, 88, 168, 328
|
||||
- ATmega8535, 16, 32, 164, 324, 644, 1284,
|
||||
- ATmega64, 128
|
||||
- ATmega4809 (Nano every)
|
||||
- ATtiny3217 (Tiny Core 32 Dev Board)
|
||||
- ATtiny84, 85, 167 (Digispark + Digispark Pro)
|
||||
- SAMD21 (Zero, MKR*, **but not SAMD51 and not DUE, the latter is SAM architecture**)
|
||||
- ESP32 (ESP32 C3 since board package 2.0.2 from Espressif)
|
||||
- ESP8266 [This fork](https://github.com/crankyoldgit/IRremoteESP8266) supports an [impressive set of protocols and a lot of air conditioners](https://github.com/crankyoldgit/IRremoteESP8266/blob/master/SupportedProtocols.md)
|
||||
- Sparkfun Pro Micro
|
||||
- Nano Every, Uno WiFi Rev2, nRF5 BBC MicroBit, Nano33_BLE
|
||||
- BluePill with STM32
|
||||
- RP2040 based boards (Raspberry Pi Pico, Nano RP2040 Connect etc.)
|
||||
|
||||
We are open to suggestions for adding support to new boards, however we highly recommend you contact your supplier first and ask them to provide support from their side.<br/>
|
||||
If you can provide **examples of using a periodic timer for interrupts** for the new board, and the board name for selection in the Arduino IDE, then you have way better chances to get your board supported by IRremote.
|
||||
|
||||
<br/>
|
||||
|
||||
# Timer and pin usage
|
||||
The **receiver sample interval of 50 µs is generated by a timer**. On many boards this must be a hardware timer. On some boards where a software timer is available, the software timer is used.<br/>
|
||||
Every pin can be used for receiving.
|
||||
|
||||
The MinimalReceiver example uses the **TinyReceiver** library, which can **only receive NEC codes, but does not require any timer**.
|
||||
|
||||
The code for the timer and the **timer selection** is located in [private/IRTimer.hpp](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/src/private/IRTimer.hpp). It can be adjusted here.<br/>
|
||||
**Be aware that the hardware timer used for receiving should not be used for analogWrite()!**.<br/>
|
||||
|
||||
| Board/CPU | Receive<br/>& PWM Timers| Hardware-PWM Pin | analogWrite()<br/>pins occupied by timer |
|
||||
|--------------------------------------------------------------------------|-------------------|---------------------|-----------------------|
|
||||
| [ATtiny84](https://github.com/SpenceKonde/ATTinyCore) | **1** | **6** |
|
||||
| [ATtiny85 > 4 MHz](https://github.com/SpenceKonde/ATTinyCore) | **0**, 1 | **0**, 4 | **0**, 1 & 4 |
|
||||
| [ATtiny88 > 4 MHz](https://github.com/SpenceKonde/ATTinyCore) | **1** | **PB1 / 8** | **PB1 / 8 & PB2 / 9** |
|
||||
| [ATtiny167 > 4 MHz](https://github.com/SpenceKonde/ATTinyCore) | **1** | **9** | **8 - 15** |
|
||||
| [ATtiny1604](https://github.com/SpenceKonde/megaTinyCore) | **TCB0** | **PA05** |
|
||||
| [ATtiny3217](https://github.com/SpenceKonde/megaTinyCore) | **TCA0**, TCD | % |
|
||||
| [ATmega8](https://github.com/MCUdude/MiniCore) | **1** | **9** |
|
||||
| ATmega168, **ATmega328** | 1, **2** | 9, **3** | 9 & 10, **3 & 11** |
|
||||
| [ATmega1284](https://github.com/MCUdude/MightyCore) | 1, **2**, 3 | 13, 14, 6 |
|
||||
| [ATmega164, ATmega324, ATmega644](https://github.com/MCUdude/MightyCore) | 1, **2** | 13, **14** |
|
||||
| [ATmega8535 ATmega16, ATmega32](https://github.com/MCUdude/MightyCore) | **1** | **13** |
|
||||
| [ATmega64, ATmega128, ATmega1281, ATmega2561](https://github.com/MCUdude/MegaCore) | **1** | **13** |
|
||||
| [ATmega8515, ATmega162](https://github.com/MCUdude/MajorCore) | **1** | **13** |
|
||||
| ATmega1280, ATmega2560 | 1, **2**, 3, 4, 5 | 5, 6, **9**, 11, 46 |
|
||||
| ATmega4809 | **TCB0** | **A4** |
|
||||
| Leonardo (Atmega32u4) | 1, 3, **4_HS** | 5, **9**, 13 |
|
||||
| Zero (SAMD) | **TC3** | \*, **9** |
|
||||
| [ESP32](http://esp32.net/) | **Ledc chan. 0** | All pins |
|
||||
| [Sparkfun Pro Micro](https://www.sparkfun.com/products/12640) | 1, **3** | **5**, 9 |
|
||||
| [Teensy 1.0](https://www.pjrc.com/teensy/pinout.html) | **1** | **17** | 15, 18 |
|
||||
| [Teensy 2.0](https://www.pjrc.com/teensy/pinout.html) | 1, 3, **4_HS** | 9, **10**, 14 | 12 |
|
||||
| [Teensy++ 1.0 / 2.0](https://www.pjrc.com/teensy/pinout.html) | 1, **2**, 3 | **1**, 16, 25 | 0 |
|
||||
| [Teensy-LC](https://www.pjrc.com/teensy/pinout.html) | **TPM1** | **16** | 17 |
|
||||
| [Teensy 3.0 - 3.6](https://www.pjrc.com/teensy/pinout.html) | **CMT** | **5** |
|
||||
| [Teensy 4.0 - 4.1](https://www.pjrc.com/teensy/pinout.html) | **FlexPWM1.3** | **8** | 7, 25 |
|
||||
| [BluePill / STM32F103C8T6](https://github.com/stm32duino/Arduino_Core_STM32) | **3** | % | **PA6 & PA7 & PB0 & PB1** |
|
||||
| [BluePill / STM32F103C8T6](https://stm32-base.org/boards/STM32F103C8T6-Blue-Pill) | **TIM4** | % | **PB6 & PB7 & PB8 & PB9** |
|
||||
| [RP2040 / Pi Pico](https://github.com/earlephilhower/arduino-pico) | [default alarm pool](https://raspberrypi.github.io/pico-sdk-doxygen/group__repeating__timer.html) | All pins | No pin |
|
||||
| [RP2040 / Mbed based](https://github.com/arduino/ArduinoCore-mbed) | Mbed Ticker | All pins | No pin |
|
||||
|
||||
The **send PWM signal** is by default generated by software. **Therefore every pin can be used for sending**.
|
||||
The PWM pulse length is guaranteed to be constant by using `delayMicroseconds()`.
|
||||
Take care not to generate interrupts during sending with software generated PWM, otherwise you will get jitter in the generated PWM.
|
||||
E.g. wait for a former `Serial.print()` statement to be finished by `Serial.flush()`.
|
||||
Since the Arduino `micros()` function has a resolution of 4 µs at 16 MHz, we always see a small jitter in the signal, which seems to be OK for the receivers.
|
||||
|
||||
| Software generated PWM showing small jitter because of the limited resolution of 4 µs of the Arduino core `micros()` function for an ATmega328 | Detail (ATmega328 generated) showing 30% duty cycle |
|
||||
|-|-|
|
||||
|  |  |
|
||||
|
||||
## Incompatibilities to other libraries and Arduino commands like tone() and analogWrite()
|
||||
If you use a library which requires the same timer as IRremote, you have a problem, since **the timer resource cannot be shared simultaneously** by both libraries.
|
||||
|
||||
### Change timer
|
||||
The best approach is to change the timer used for IRremote, which can be accomplished by specifying the timer before `#include <IRremote.hpp>`.<br/>
|
||||
The timer specifications available for your board can be found in [private/IRTimer.hpp](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/src/private/IRTimer.hpp).<br/>
|
||||
|
||||
```c++
|
||||
// Arduino Mega
|
||||
#elif defined(__AVR_ATmega1280__) || defined(__AVR_ATmega2560__)
|
||||
# if !defined(IR_USE_AVR_TIMER1) && !defined(IR_USE_AVR_TIMER2) && !defined(IR_USE_AVR_TIMER3) && !defined(IR_USE_AVR_TIMER4) && !defined(IR_USE_AVR_TIMER5)
|
||||
//#define IR_USE_AVR_TIMER1 // send pin = pin 11
|
||||
#define IR_USE_AVR_TIMER2 // send pin = pin 9
|
||||
//#define IR_USE_AVR_TIMER3 // send pin = pin 5
|
||||
//#define IR_USE_AVR_TIMER4 // send pin = pin 6
|
||||
//#define IR_USE_AVR_TIMER5 // send pin = pin 46
|
||||
# endif
|
||||
```
|
||||
Here you see the Arduino Mega board and the available specifications are `IR_USE_AVR_TIMER[1,2,3,4,5]`.<br/>
|
||||
You **just have to include a line** e.g. `#define IR_USE_AVR_TIMER3` before `#include <IRremote.hpp>` to enable timer 3.
|
||||
|
||||
But be aware that the new timer in turn might be incompatible with other libraries or commands.<br/>
|
||||
For other boards/platforms you must look for the appropriate section guarded by e.g. `#elif defined(ESP32)`.
|
||||
|
||||
### Stop and start timer
|
||||
Another approach can be to share the timer **sequentially** if their functionality is used only for a short period of time like for the **Arduino tone() command**.
|
||||
An example can be seen [here](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/21b5747a58e9d47c9e3f1beb056d58c875a92b47/examples/ReceiveDemo/ReceiveDemo.ino#L159-L169), where the timer settings for IR receive are restored after the tone has stopped.
|
||||
For this we must call `IrReceiver.start()` or better `IrReceiver.start(microsecondsOfToneDuration)`.<br/>
|
||||
This only works since each call to` tone()` completely initializes the timer 2 used by the `tone()` command.
|
||||
|
||||
## Hardware-PWM signal generation for sending
|
||||
If you define `SEND_PWM_BY_TIMER`, the send PWM signal is forced to be generated by a hardware timer on most platforms.<br/>
|
||||
The same timer as for the receiver is used.<br/>
|
||||
Since each hardware timer has its dedicated output pins, you must change timer to change PWM output.<br/>
|
||||
**Exeptions** are currently [ESP32, ARDUINO_ARCH_RP2040, PARTICLE and ARDUINO_ARCH_MBED](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/39bdf8d7bf5b90dc221f8ae9fb3efed9f0a8a1db/examples/SimpleSender/PinDefinitionsAndMore.h#L273), where **PWM generation does not require a timer**.
|
||||
|
||||
## Why do we use 30% duty cycle for sending
|
||||
We do it according to the statement in the [Vishay datasheet](https://www.vishay.com/docs/80069/circuit.pdf):
|
||||
- Carrier duty cycle 50 %, peak current of emitter IF = 200 mA, the resulting transmission distance is 25 m.
|
||||
- Carrier duty cycle 10 %, peak current of emitter IF = 800 mA, the resulting transmission distance is 29 m. - Factor 1.16
|
||||
The reason is, that it is not the pure energy of the fundamental which is responsible for the receiver to detect a signal.
|
||||
Due to automatic gain control and other bias effects, high intensity of the 38 kHz pulse counts more than medium intensity (e.g. 50% duty cycle) at the same total energy.
|
||||
|
||||
<br/>
|
||||
|
||||
# How we decode signals
|
||||
The IR signal is sampled at a **50 µs interval**. For a constant 525 µs pulse or pause we therefore get 10 or 11 samples, each with 50% probability.<br/>
|
||||
And believe me, if you send a 525 µs signal, your receiver will output something between around 400 and 700 µs!<br/>
|
||||
Therefore **we decode by default with a +/- 25% margin** using the formulas [here](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/src/IRremoteInt.h#L376-L399).<br/>
|
||||
E.g. for the NEC protocol with its 560 µs unit length, we have TICKS_LOW = 8.358 and TICKS_HIGH = 15.0. This means, we accept any value between 8 ticks / 400 µs and 15 ticks / 750 µs (inclusive) as a mark or as a zero space. For a one space we have TICKS_LOW = 25.07 and TICKS_HIGH = 45.0.<br/>
|
||||
And since the receivers generated marks are longer or shorter than the spaces, we have introduced the [`MARK_EXCESS_MICROS` value]/https://github.com/Arduino-IRremote/Arduino-IRremote#protocolunknown)
|
||||
to compensate for this receiver (and signal strength as well as ambient light dependent :disappointed: ) specific deviation.<br/>
|
||||
Welcome to the world of **real world signal processing**.
|
||||
|
||||
<br/>
|
||||
|
||||
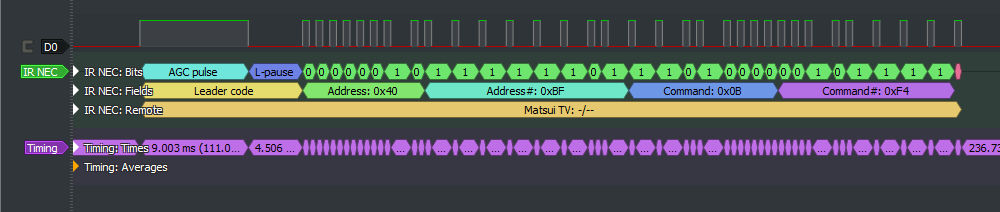
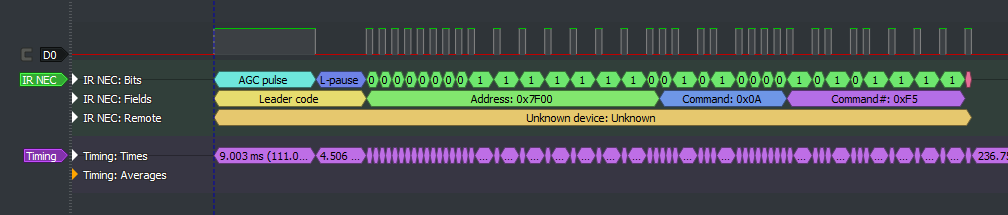
# NEC encoding diagrams
|
||||
Created with sigrok PulseView with IR_NEC decoder by DjordjeMandic.<br/>
|
||||
8 bit address NEC code
|
||||
|
||||
16 bit address NEC code
|
||||
|
||||
|
||||
<br/>
|
||||
|
||||
# Quick comparison of 5 Arduino IR receiving libraries
|
||||
[Here](https://github.com/crankyoldgit/IRremoteESP8266) you find an **ESP8266/ESP32** version of IRremote with an **[impressive list of supported protocols](https://github.com/crankyoldgit/IRremoteESP8266/blob/master/SupportedProtocols.md)**.
|
||||
|
||||
**This is a short comparison and may not be complete or correct.**
|
||||
|
||||
I created this comparison matrix for [myself](https://github.com/ArminJo) in order to choose a small IR lib for my project and to have a quick overview, when to choose which library.<br/>
|
||||
It is dated from **24.06.2022**. If you have complains about the data or request for extensions, please send a PM or open a discussion.
|
||||
|
||||
| Subject | [IRMP](https://github.com/IRMP-org/IRMP) | [IRLremote](https://github.com/NicoHood/IRLremote) | [IRLib2](https://github.com/cyborg5/IRLib2)<br/>**mostly unmaintained** | [IRremote](https://github.com/Arduino-IRremote/Arduino-IRremote) | [Minimal NEC](https://github.com/Arduino-IRremote/Arduino-IRremote/tree/master/examples/MinimalReceiver) | [IRsmallDecoder](https://github.com/LuisMiCa/IRsmallDecoder)
|
||||
|---------|------|-----------|--------|----------|----------|----------|
|
||||
| Number of protocols | **50** | Nec + Panasonic + Hash \* | 12 + Hash \* | 17 + PulseDistance + Hash \* | NEC | NEC + RC5 + Sony + Samsung |
|
||||
| Timing method receive | Timer2 or interrupt for pin 2 or 3 | **Interrupt** | Timer2 or interrupt for pin 2 or 3 | Timer2 | **Interrupt** | **Interrupt** |
|
||||
| Timing method send | PWM and timing with Timer2 interrupts | Timer2 interrupts | Timer2 and blocking wait | PWM with Timer2 and/or blocking wait with delay<br/>Microseconds() | % | % |
|
||||
| Send pins| All | All | All ? | Timer dependent | % | % |
|
||||
| Decode method | OnTheFly | OnTheFly | RAM | RAM | OnTheFly | OnTheFly |
|
||||
| Encode method | OnTheFly | OnTheFly | OnTheFly | OnTheFly or RAM | % | % |
|
||||
| Callback suppport | x | % | % | % | x | % |
|
||||
| Repeat handling | Receive + Send (partially) | % | ? | Receive + Send | Receive | Receive |
|
||||
| LED feedback | x | % | x | x | x | % |
|
||||
| FLASH usage (simple NEC example with 5 prints) | 1820<br/>(4300 for 15 main / 8000 for all 40 protocols)<br/>(+200 for callback)<br/>(+80 for interrupt at pin 2+3)| 1270<br/>(1400 for pin 2+3) | 4830 | 1770 | **900** | ?1100? |
|
||||
| RAM usage | 52<br/>(73 / 100 for 15 (main) / 40 protocols) | 62 | 334 | 227 | **19** | 29 |
|
||||
| Supported platforms | **avr, megaavr, attiny, Digispark (Pro), esp8266, ESP32, STM32, SAMD 21, Apollo3<br/>(plus arm and pic for non Arduino IDE)** | avr, esp8266 | avr, SAMD 21, SAMD 51 | avr, attiny, [esp8266](https://github.com/crankyoldgit/IRremoteESP8266), esp32, SAM, SAMD | **All platforms with attach<br/>Interrupt()** | **All platforms with attach<br/>Interrupt()** |
|
||||
| Last library update | 6/2022 | 4/2018 | 3/2022 | 6/2022 | 6/2022 | 2/2022 |
|
||||
| Remarks | Decodes 40 protocols concurrently.<br/>39 Protocols to send.<br/>Work in progress. | Only one protocol at a time. | Consists of 5 libraries. **Project containing bugs - 45 issues, no reaction for at least one year.** | Decoding and sending are easy to extend.<br/>Supports **Pronto** codes. | Requires no timer. | Requires no timer. |
|
||||
|
||||
\* The Hash protocol gives you a hash as code, which may be sufficient to distinguish your keys on the remote, but may not work with some protocols like Mitsubishi
|
||||
|
||||
<br/>
|
||||
|
||||
# Useful links
|
||||
- [List of public IR code databases](http://www.harctoolbox.org/IR-resources.html)
|
||||
- [LIRC database](http://lirc-remotes.sourceforge.net/remotes-table.html)
|
||||
- [IRMP list of IR protocols](https://www.mikrocontroller.net/articles/IRMP_-_english#IR_Protocols]
|
||||
- [IR Remote Control Theory and some protocols (upper right hamburger icon)](https://www.sbprojects.net/knowledge/ir/)
|
||||
- [Interpreting Decoded IR Signals (v2.45)](http://www.hifi-remote.com/johnsfine/DecodeIR.html)
|
||||
- ["Recording long Infrared Remote control signals with Arduino"](https://www.analysir.com/blog/2014/03/19/air-conditioners-problems-recording-long-infrared-remote-control-signals-arduino)
|
||||
- The original blog post of Ken Shirriff [A Multi-Protocol Infrared Remote Library for the Arduino](http://www.arcfn.com/2009/08/multi-protocol-infrared-remote-library.html)
|
||||
- [Vishay datasheet](https://www.vishay.com/docs/80069/circuit.pdf)
|
||||
|
||||
# License
|
||||
Up to the version 2.7.0, the License is GPLv2.
|
||||
From the version 2.8.0, the license is the MIT license.
|
||||
|
||||
# Copyright
|
||||
Initially coded 2009 Ken Shirriff http://www.righto.com<br/>
|
||||
Copyright (c) 2016-2017 Rafi Khan<br/>
|
||||
Copyright (c) 2020-2022 [Armin Joachimsmeyer](https://github.com/ArminJo)
|
||||
Reference in New Issue
Block a user